دانلود با لینک مستقیم و پر سرعت .
1 مقدمه
این فصل ترمز گیری را با آزمون های بنیادی ترمز گیری وسائط نقلیه توضیح می دهد که شامل موارد سطح مشترک لاستیک با جاده، دینامیک خودرو، و اجزای سیستم ترمز معمولی، و پیشرفت اهداف سیستم های ضد قفل، اجزای آن، ملاحظات ایمنی، منطق کنترل، و مراحل تست می باشد. این فصل با تشریح سیستم های ترمز گیری خودروهای آینده به پایان می رسد.
برای سادگی و به خاطر اینکه برای بیشتر خودروها روی جاده، قابلیت کاربرد، وجود داشته باشد، سیستم های ترمز هیدرولیکی مورد استفاده روی دو محور به عنوان یک موضوع انحصاری توضیح داده نشده اند. این نوع از سیستمها دراتومبیل های مسافرتی کامیونهای سبک، و درآمریکای شمالی روی کامیونهای سبک استفاده می شوند.
2.2 مبانی ترمزگیری خودروها
اصل فهمیدن تکنولوژی وابسته به ترمزگیری وسایل نقلیه مدرن شامل، آگاهی از سطح مشترک لاستیک با جاده، دینامیک خودرو هنگام ترمزگیری، و اجرای سیستم ترمزگیری است. این بخش برای یک سیستم پایه جهت درک مطلب این موارد را توضیح می دهد.
1.2.2 فصل مشترک تایر با جاده
نیروی ترمزگیری تولید شده در هر چرخ از وسیله درهنگام ترمزگیری تابعی از نیروی نرمال روی چرخ و ضریب اصطکاکی بین تایر و جاده است. این ارتباط بین وزن روی چرخ ونیروی اصطکاک حاصله ( ترمز) درمعادله ( 1،2) ساده شده است.
1،2
که:
نیروی اصطکاکX جهت =Fx
ضریب اصطکاک تایر و جاده =
وزن استاتیکی و دینامیکی روی چرخ= Wwh
ضریب اصطکاک تایر با جاده ثابت نیست ولی تابعی از عوامل خیلی مهمی مثل سطح جاده و شیب جغرافیایی نسبی بین تایر و جاده است. منحنی ضریب اصطکاک چرخهای لغزان با سطوح مختلف 2.1 نشان داده شده است. از این منحنی و معادله 2.1 ملاحظات زیر به دست می آید:
نیروی اصطکاک تولیدی بستگی به لغزش چرخ دارد. اگر تایر در همان سرعت مماسی روی جاده بغلتد، هیچ نیروی طولی ( ترمزی ) وجود دارد. این ارتباط در فهم ترمز گیری مساله ای بنیادی است و به سادگی مشاهده نمی شود؛ درمورد چرخهای دیگری که لغزش آنها به غیر از حدود 100درصد است، ( یعنی هیچ سرعت لغزشی نباشد) تشخیص اصطکاک بدون ابزار مشکل است.
بیشترین نیروی اصطکاک ( ترمزگیری) تحت شرایط نسبتاً لغزش کم رخ می دهد. این امر اشاره بر این دارد که ترمزهای قوی که در لغزش 100درصد رخ می دهند معمولاً بیشترین نیروی ترمز را تولید نمی کنند تلفیق یکنواخت و فشار کنترل شده ترمزگیری توسط یک راننده ماهر یا کنترل سرتاسری ضد قفل، در بیشتر سطوح، کوتاه ترین توقف را ایجاد می کند.
مقدار نیروی اصطکاکی( ترمزی) تولید شده یا سطح جاده به طور گسترده ای فرق میکند. در نتیجه این ارتباط معلوم است که راننده و مسافران درمدت فاصله توقف و یا شتاب منفی اگر روی جاده آسفالت خشک باشد، ترمزگیری با ترمزگیری روی یخ مقایسه می شود.
معمولاً بعد از ماکزیمم نیروی اصطکاک ممکنه در یک سطح جاده داده شده، شیب منحنی منفی می شود. این پدیده ( در اصل نشان می دهد که بعد از شیب منجر به نیروی اصطکاک ماکزیمم، فشار بیشتر پدال، ترمز کمتری در پی خواهد داشت) روشن می کند که چرا یک راننده ماهر می تواند فاصله کوتاهتری را نسبت به راننده کم تجربه به دست آورد و چرا کنترل الکترونیکی خودرو آن را کامل می کند. همچنین مقدار پیک منحنی های ضریب اصطکاک با سطح جاده، به طور گسترده ای فرق می کند. برای مثال، بیشترین سود نیروی ترمزی می تواند از کنترل سطوحی مثل یخ تا آسفالت خشک به دست آید.
مشخصه مهم دیگر تایرهای خودرو درترمزگیری، نیروی جانبی بر حسب لغزش است. نیروی جانبی نیروی نگهدارنده تایر از لغزش است تا تایر در یک جهت نرمال هم
جهت با وسیله بماند. معادله نیروی جانبی ذیلاً آمده است:
Fy= MleteralWwh
که
نیروی اصطکاکی ( متغیر) با جهت =Fy
ضریب اصطکاکی جانبی تایر با جاده=Mleteral
نیروی جانبی در صورتی که یک چرخ هنگام ترمزگیری، طولی بلغزد، سریعاً از بین می رود.
لغزش اضافی درچرخهای عقبی یک خودرو و افت نیروی جانبی، در بی ثباتی چرخهای عقب خودرو دخالت می کنند. و تمایل به لغزش از پهلو با نیروهای جانبی کوچک دروسیله را به وجود می آورند. لغزش اضافی چرخ و افت نیروی اصطکاکی جانبی در چرخهای جلوی خودرو، در کم کردن قابلیت هدایت خودرو اثر می گذارند. این افت قابلیت هدایت پدیده ایست که معمولاً هنگام توقف های ناگهانی روی سطوح با اصطکاک کم مثل یخ روی می دهد. همچنانکه یک ترمزگیری شدید تایرها را در وضعیت لغزش 100درصد قرار میدهد.
2،2.2 دینامیک خودرو هنگام ترمزگیری
یک معادله برای کارایی ترمزگیری می تواند از قانون دوم نیوتن تعیین شود: مجموع نیروهای خارجی وارده روی یک جسم در یک جهت داده شده ، برابر است با حاصلضرب جرم و شتاب آن در همان جهت. با توجه به این قانون برای ترمزگیری مستقیم الخط، فاکتورهای مهم درمعادله 2،2 آورده شده است. و مجموع نیروهای عمل کننده روی وسیله در شکل 2،2 نشان داده شده است.
شکل 1،2 ضریب اصطکاک طولی، تابعی از لغزش چرخ
2.2
که:
جرم وسیله =M
شتاب خطی در جهت X =ax
وزن وسیله =W
شتاب ثقل =g
شتاب منفی خطی Dx=-ax=
نیروی ترمزی محور جلو Fxf=
نیروی ترمزی محور عقب Fxr=
( فرض شده که دریک نقطه عمل می کنند) کشش ( درگ) آیرودینامیکDA=
زاویه وسط جاده =
= ضریب مقاومت غلتشی Fr=
FIGURE 2.2 Significant forces’ action on vehicle during braking
شکل 2.2 عوامل مهم عمل کننده روی وسیله هنگام ترمزگیری
اگر نیروهای ترمزی ثابت نگه داشته شوند و اثرات سرعت خودرو روی درگ آید و دینامیکی و مقاومت غلتشی نادیده گرفته شوند، تغییرات زمان سرعت یک خودرو معادله (15.3)، و فاصله طی شده در طول سرعت گیری، معادله (15.4) می توانند از قانون دوم نیوتن مشتق شوند.
2.3
مجموع نیروهای شتاب منفی روی وسیله =Fxt
زمان =t
سرعت اولیه = V0
سرعت نهایی =VF
2.4
فاصله در جهت مثبت=X
این شباهت ها نشان می دهد که زمان توقف مناسب با سرعت وسیله و فاصله توقف
متناسب با توان دوم سرعت وسیله است. هنگام ترمزگیری، انتقال بار دینامیکی صورت میگیرد که عاملی است از ارتفاع مرکز جرم، وزن خودرو، فاصله بین محور جلو و محور عقب، و نرخ شتاب منفی. معادله 5،2 این انتقال بار دینامیکی را تشریح می کند:
2.5
وزن دینامیکی =Wd
ارتفاع مرکز جرم=h
فاصله بین محورهای عقب و جلو=l
وزن استاتیکی خودرو=w
شتاب ثقل=g
شتاب منفی در جهت مثبت=Dx
ارتفاع درگ آیرودینامیکی=hA
با توجه به این که خودروها دو محوره هستند، این انتقال بار هنگام ترمزگیری به چرخهای جلو اضافه می شود و از چرخهای عقب کم می شود. که به ترتیب در معادلات 2.6 و 7،2 نشان داده شده است.
2.6
که:
ماکسیمم نیروی اصطکاکی روی چرخهای جلو در جهت طولی=Fxmt
بیشترین ضریب اصطکاک= Mp
وزن اصطکاکی چرخهای جلو=Wfs
2.7
ماکسیمم نیروی اصطکاکی روی چرخهای عقب در جهت طولی=Fxmr
وزن اصطکاکی چرخهای عقب=Wrs
معادله 2.2 برای موارد ْ0 = Q و درک آیرودینامیکی و مقاومت غلتشی کم معادله زیر را نتیجه می دهد:
با حل کردن برای Dx و جایگزینی در معادلات 6،2 و 7،2 ، به ترتیب معادلات 2.8 و 2.9 به دست می آیند.
(8-2)
این روابط نشان می دهند که بیشترین نیروی اصطکاک روی چرخهای جلو، به نیروی اصطکاک روی چرخهای عقب در مدت شتاب منفی و انتقال بار به جلوی مربوطه بستگی دارد. به روش مشابه، نیروی ترمزی روی چرخهای عقب به نیروی ترمزی روی چرخهای جلو بستگی دارد.
با توجه به کاربردهای معادلات قبل، طراحان سیستم های ترمز می توانند نیروی کلی ترمزی مورد نیاز برای رسیدن به شتاب منفی مطلوب را تعیین کنند و اجزای سیستم ترمز می توانند به طور مقتضی اندازه گذاری شوند. نیازهای ایمنی و قانونی این نکته را وضع می کند که طراحان سیستم، شتاب منفی تحت بارهای سرعتی و وضعیت های بی باری را مثل وضعیت های سیستم ترمز با نقص جزئی( مثل نقص های نیم سیستم یا افت ترمز کمکی برای ورودی سیستم ) در نظر بگیرند. به دلیل این ملاحظات و بقیه موارد مثل کورس پدال مطلوب مشتری و نیروی پدال انتظار کاهش سرعت، تلاشهای مهندسی اندازه زنی سیستم ترمزگیری وسیله نقلیه معمولاً با کمک یک برنامه کامپیوتری شبیه ساز خودرو کامل می شود.
2.2.3 اجزای سیستم ترمز:
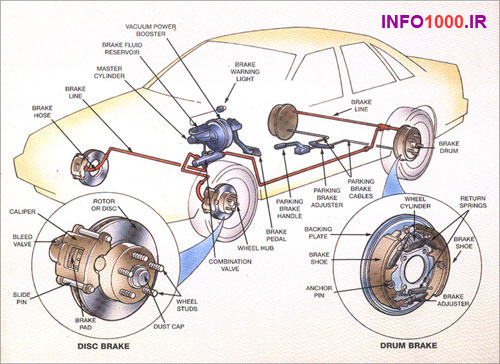
ترمزهای دیسکی شکل 3،2 یک دیاگرام شماتیک از یک ترمز دیسکی است. دراین نوع از سیستم نیرو به هر دو طرف روتور وارد می شود و ترمز گیری به واسطه عمل اصطکاکی لایه های ترمز داخلی و خارجی برخلاف گردش روتور، به انجام می رسد.
لایه ها شامل یک اندازه گیر در داخلشان هستند( نشان داده شده است) که مثل سیلندر چرخ است.
اگرچه این نوع ارزان تر هستند ولی ترمزهای دیسکی این مزیت را دارند که ترمزگیری خطی نسبتاً بهتری را همراه با قابلیت نوسان صدای کمتر نسبت به ترمزهای کاسه ای فراهم می آورد.
نیروی به کار رفته توسط لایه ها روی روتور، تابعی است از فشار هیدرولیکی سیستم ترمز و سطح استوانه ای چرخ( با استوانه ها، هر طور که طراحی شده است) گشتاور استاتیکی ترمز می تواند با استفاده از معادله زیر محاسبه شود.
10-2 T= PEAR
تورک ترمزی= T
فشار عملکرد = p
مساحت استوانه ای چرخ = A
ضریب کاردهی نسبت سطح جاروب شده دیسک به نیروی وارده به کفشک ها=E
شعاع ترمز= R
نیروی ترمزی استاتیکی می تواند از رابطده زیر محاسبه شود
که:
نیروی ترمزی=Fb
شعاع غلتشی تایر= r
ترمزهای کاسه ای:
شکل 2.4 شکل شماتیک یک ترمز کاسه ای را تشریح می کند.
درترمزهای کاسه ای نیرو به یک جفت از کفشک ها وارد می شود که ساختارهای گوناگونی دارند: کفشک پیشتاز/ دنباله دار( نوع ساده) دوتایی- دوطرفه، دوتایی- خودکار.
ترمزهای کاسه ای ، خصوصیات بهتری نسبت به ترمزهای دیسکی دارند ولی بعضی از اشکال این ترمزها تمایل بیشتری به حساس و غیر خطی کردن نوسان صدا دارند و تمایل به تغییر ضریب اصطکاک بقیه ترمزها دارند.
شکل 2.4 شماتیک ترمز کاسه ای
معادله تورک ترمزی استاتیکی که قبل از این برای ترمزهای دیسکی آورده شد، معادله 2.10 ، برای ترمزهای کاسه ای با تغییرات طراحی ویژه برای شعاع ترمز و ضریب تاثیرهای مختلف معتبر است. در طراحی، شعاع ترمز برای ترمز های کاسه ای، نصف قطر کاسه است. ضریب تاثیر، اختلاف عملکرد اساسی را بین ترمزهای دیسکی و کاسه ای بیان می کند.
هندسه ترمزهای کاسه ای شاید تولید مقداری نیروی اصطکاکی روی کفشک ها را ممکن سازد که به خاطر نوع گردش آن برخلاف کاسه، افزایش نیروی اصطکاکی هم ممکن می شود. این عمل می تواند یک مزیت مکانیکی باشد که به طور قابل ملاحظه ای ، سود ترمزگیری و ضریب تاثیر را افزایش می دهد که می تواند با ترمزهای دیسکی مقایسه شود. نیروی دینامیکی ترمزی، برای ترمزهای کاسه ای و دیسکی به سادگی از ضریب اصطکاک خطی ترمز محاسبه می شود که عاملی از دما است. همچنانکه گرمای لنت ها هنگام عملیات ترمزگیری، ضریب اصطکاک موثر را افزایش می دهدو برای ثابت نگه داشتن تورک ترمزی، فشار کمتری مورد نیاز است.
سیلندر اصلی و سیلندر کمکی
شکل 2.5 طرح شماتیکی از یک پدال ترمز، یک بوستر خلاو یک سیلندر اصلی را نشان می دهد. در تجربیات واقعی، در اتومبیل های مسافرتی و کامیون های سبک یک افزایش نیروی مکانیکی به دلیل هندسه پدال ترمز معمولاً 3 تا 4 و افزایش خلا کمکی معمولاً 5 تا 9 . بعد از رسیدن بوستر به نقطه شکست آن و قبل از رخ دادن خستگی، وجود دارد.
بنابراین، معمولاً نیروی به کار رفته توسط اپراتور، با یک عروس 12 تا 36 در سیلندر
اصلی بر اساس رسیدن به فشار لازم ترمزگیری خراب می شود. فشار سیلندر اصلی از رابطه زیر نتیجه می شود:
که:
بازده مکانیکی=
فشار سیلندر اصلی= pMC
نیروی اپراتور روی پدال ترمز=Fop
بهبود مکانیکی مربوط به هندسه نصب پدال ترمز و نیروی بازگشت آنی فنر=Gmech
تقویت ترمز کمکی:
یک تابع یا مینیمم نیروی شکست غیر خطی که برای آغاز کمک و یک پدیده خستگی منجر به بهبود نیروی کم شده بعد ازاینکه نیروی ورودی به کارگرفته شد، لازم است. =Gboost
نیروی برگشت فنر=FS
مساحت سیلندر اصلی، قسمتی که نیرو عملمیکند(مساحت محفظه پیستون)= Apiston
سیلندر اصلی برای بهبود ایمنی و برای اجتناب از افت سیستم ترمز درموارد نقص در یک قسمت از سیستم، از قسمتهای جداگانه اولیه و ثانویه تشکیل شده است. معمول ترین ساختار در شکل 2.5 با دو محفظه درون یک حفره، نشان داده شده است.
سوپاپ تناسب:
همانطوری که در معادله 2.5 نشان داده شده است، به دلیل انتقال وزن دینامیکی، فشار ترمزیی که برای ترمزگیری با شتاب منفی بزرگ روی چرخهای جلو لازم است، معمولاً خیلی بیشتر از چرخهای عقب است. که درنتیجه چرخهای عقب هنگام ترمزگیری وضعیت قفل شدگی از خود نشان می دهند. این مساله می تواند استفاده از سوپاپ تناسب را به طرز قابل توجهی کاهش دهد، سوپاپ های تناسب استاندارد، هنگام فشارهای ورودی پایین، ترمزهای معادلی را بین چرخهای عقب و جلو توزیع می کند( متناسب با نرخ شتاب منفی و جابه جایی بار دینامیکی کوچک) ولی وقتی که فشار به یک مقدار ثابتی رسد( فشار ترک). افزایش سوپاپ را به کمتر از 1 می رساند.
خیلی از سوپاپهای حسگر بار در بعضی از کاربردهایی که لازم باشد، مورد استفاده قرار می گیرند، مثل وقتی که انتقال بار دینامیکی و تغییرات باری وسیله به اندازه ای هست که یک سوپاپ تناسب ثابت برای ترمزگیری خوب در همه وضعیت ها کافی نباشد. سوپاپهای حسگر بار پیشرو ابزاری برای اندازه گیری وزن روی چرخهای عقب و بنابراین تنظیم منفعت کلی سوپاپ می باشند.
شکل 2.6 دو نوع از معمولترین سوپاپ های متقارن برای سیستمهای کامیون های سبک واتومبیل های مسافرتی را نشان می دهد.
سیستم ترمز عمودی دوتکه معمولاً روی وسیله های رانندگی از چرخ عقب استفاده می شوند و سیستم های دو تکه قطری روی وسیله های رانندگی از چرخ جلو استفاده میشوند.
شکل 6-2
گستردگی استفاده از سیستم های دوتکه قطری نتیجه مستقیم اقبال عمودی استفاده ازوسائط نقلیه رانندگی از چرخ جلو می باشد.
2.3 سیستم های ضد قفل:
اگر چه مفاهیم ضد قفل در چند دهه اخیر مطرح شده است، گستردگی استفاده از ضد قفل ( که به نام های ضد لغزش و ABS هم خوانده می شود) در سال 1980 با سیستم های توسعه یافته جایگزین شده میکروپروسنسور/ میکروکنترلر ها درواحدهای آنالوگ، شروع شد. یک سیستم ضد قفل شامل یک مدولاتور هیدرولیکی و منبع قویتر هیدرولیکی است که می تواند هم با بوستر و سیلندر اصلی، سنسورهای سرعت خودرو و یک واحد کنترل الکترونیکی پیوسته باشد ، هم می تواند پیوسته نباشد. وظیفه بنیادی سیستم ضد قفل، ممانعت از قفل شدگی چرخ است که توسط احساس آستانه قفل شدگی و عمل کرد از طریق مدولاتور هیدرولیکی برای کاهش فشارترمزی در چرخها تا رسیدن به مقدار کافی است که موجب می شود سرعت چرخ به سطح لغزش کافی، نزدیک به نقطه بهینه کارایی ترمز، برگردد.
2.3.1 اهداف
اهداف سه گانه سیستم ضد قفل عبارتست از: کاهش فاصله توقف، بهبود پایداری و بهبود قابلیت هدایت هنگام ترمزگیری.
فاصله توقف: همانطور که درمعادله 4،2 نشان داده شده است، فاصله برای توقف (Vt=0) تابعی از سرعت ورودی، جرم خودرو، ونیروی ترمزی است. از این معادله به نظر می رسد که با ماکزیمم کردن نیروی ترمزی، فاصله توقـف میـنیمم خواهـد شد، اگر بقـیه
عوامل ثابت باقی بماند.
از شکل 2.1 معلوم می شود که روی همه انواع سطوح، برای حوزه های بزرگتر یا کوچکتر، مقدار ماکسیمم نیروی اصطکاکی رخ می دهد. درنتیجه این امر که توسط نگه داشتن همه چرخهای خودرو نزدیک مقدار پیک انجام می شود سیستم ضد قفل می تواند بیشترین نیروی اصطکاک را اعمال کند و در نتیجه فاصله توقف کامل را مینیمم کند.
این یکی از اهداف سیستم ضد قفل است؛ که به هر حال با نیاز خودرو با ثبات و قابلیت هدایت خودرو، ترکیب می شود.
ثبات:
اگرچه شتاب منفی( کند کردن) و متوقف کردن خودرو، هدف بنیادی ازتاسیس سیستم ترمزگیری است، ولی ممکن است که در همه موارد، ماکزیمم نیروی اصطکاک مطلوب نباشد. برای مثال اگر یک خودرو روی سطحی با ضریب لغزشی باشد( آسفالت یا غیره) به این صورت که نیروی ترمزی قابل توجه در یک طرف خودرو بیش از طرف دیگر قبل حصول باشد به کار بردن ماکزیمم نیروی ترمزی روی هر دو طرف منجر به یک مقدار انحراف خواهد شد که وسیله را در سمت ضریب بالا نگه می دارد و به ثبات خودرو و کمک خواهد کرد. معمولاً درخودروهایی که فاصله بین محورها کوتاه است، یک استراتژی کنترل برای کنترل فشار در چرخهای عقب برای تامین ثبات وسیله، به کار گرفته می شود. به طور مشابه برای چرخهای جلو هم استراتژی کنترل به کار گرفته می شود تا اختلاف فشار پهلو به پهلوی اولیه را محدود کند تا آنجا که هیچ مقدار تغییر اضافی اجباری در چرخهای متحرک وجود نداشته باشد و نیروی اپراتور برای تصحیح و خنثی کردن مقدار انحراف کافی باشد.
اگر یک سیستم ضد قفل بتواند چرخ های وسیله را نزدیک پیک نیروی اصطکاکی نگه دارد، نیروی جانبی به طرز قابل توجهی بالا می رود ولو ماکزیمم نباشد.
قابلیت هدایت:
قابلیت هدایت بستگی به نیروهای جانبی بالا دارد. به منظور رسیدن به نیروهای جانبی و بنابراین قابلیت هدایت رضایتبخش، کنترل خوب پیک نیروی اصطکاکی ضروری است قابلیت هدایت هنگام ترمزگیری نه تنها برای مسیرهای با اصلاح کم مهم است، بلکه برای هر نوع احتمال منع یا موانع هم مهم است.
سیستم های ضد قفل کنترل تمام این خصوصیات را برای رنج پیک نیروی اصطکاکی فراهم می آورند.
2.3.2 اجزای سیستم ضد قفل
اجزای سیستم ضد قفل عبارتند از: سنسورهای سرعت چرخ، مدولاتور هیدرولیکی، منبع تغذیه هیدرولیکی( معمولاً یک موتور/ پمپ الکتریکی) و واحد کنترل الکتریکی.
سنسورهای سرعت چرخ:
برای سادگی و اثبات قابلیت اعتماد ، معمولاً در سیستم های ضد قفل ازسنسورهای سرعت چرخ با مقاومت مغناطیسی استفاده می شود و چون این سنسورها، همراه با حلقه های محرک استفاده می شوند، این نوع از سنسورها خروجی های سینوسی تولید می کنند که دقیقاً با فرکانس و دامنه سرعت زاویه ای چرخ حس شده، متناسب است.
با توجه به طراحی سنسورها و رینگ های محرک و چاک بین آنها، دامنه خروجی سنسور ممکن است که 100mv پایین تر از سرعت های وسیله و 100v بالاتر از سرعت های وسیله باشد.
سنسورهای مقاومتی تک قطبی یا چند قطبی با توجه به نوع کاربردشان استفاده می شوند. سنسورهای تک قطبی تمایل به خروجی های بهتر دارند و سنسورهای چند قطبی تمایل به جلوگیری از انتشار بعضی از نویزها دارند. محدودیت این تکنولوژی این است که در سرعت های خروجی پایین، تمایل به حس کردن همراه با واحد کنترل الکترونیکی دارد که معمولاً محیط پر سروصدایی اطراف خودرو ایجاد می کند. این امر می تواند منجر به انباشته شدن خطا از 1 تا 3 و اگر این سنسورها در اتصال با کیلومتر شمار باشند، سیستم ضد قفل از سرعتهای خیلی پایین هم جلوگیری می کند. سنسورهای یکطرفه و متعادل در واحد کنترل الکترونیکی برای دریافت سیگنال های سرعت چرخ به کار می روند. تکنولوژی های گوناگون سنسورها شامل اثر هال و تقویت کننده های مغناطیسی است که درکاربردهای دریافت سرعت های خیلی پایین و در کاربردهایی که سطوح سیگنال تخمینی مناسب در دسترس نیست به همراه سنسورهای دارای مقاومت مغناطیسی گوناگون استفاده می شود.
مدولاتور ( تلفیق کننده ) هیدرولیکی:
مدولاتور هیدرولیکی معمولاً به دو شکل در سیستم های ضد قفل نقش دارد:
موتورهای الکتریکی و سوپاپ های القایی. شکل شماتیک سیستم سوپاپ القایی ساده شده در شکل 7،2 نشان داده شده است. در این سیستم، سوپاپ های القایی از جریان سیال هیدرولیکی جاری بین سیلندر اصلی و ترمز با قطع انرژی می کنند. اگر فشار وارده به ترمزها خیلی زیاد باشد و قفل شدن چرخ ها قریب الوقوع باشد، سیستم ضد قفل سوپاپ های القایی را راه اندازی کرده،و پمپ هیدرولیکی انرژی دهی می کند. راه اندازی سوپاپ القایی، کاهش فشار از سراسر سوپاپ تا یک مخزن/ آکومولاتور کم فشار را ممکن می سازد. سیال موقتاً در مخزن اولیه ذخیره می شود تا توسط پمپ هیدرولیک به پشت سیستم پمپ می شود.
فرمت این مقاله به صورت Word و با قابلیت ویرایش میباشد
تعداد صفحات این مقاله 47 صفحه
پس از پرداخت ، میتوانید مقاله را به صورت انلاین دانلود کنید