سیستم 4WD مدت مدیدی است که ابداع شده و انواع متنوعی از آن به بازار آمده است که همه آنها با همین نام شناخته میشوند، اما در واقع موارد استفاده آنها متفاوت است.
Part Time 4WD
سیستمی است که در آن، فقط میتوان برای مدتی معین از چهار چرخ محرک استفاده کرد. این نوع سیستم 4WD برای ایجاد قدرت کشش بیشتر در وسائط نقلیه برای حمل بارهای سنگینتر و یا حرکت در شرایط نامساعد جادهای ساخته شده است. از این سیستم، فقط میتوان در شرایط نامساعد جادهای و نه در جادههای مسطح و خشک بهرهبرداری کرد، لذا واضح است که این سیستم برای انجام کارهای سخت و سنگین ساخته شده است. در جادههای هموار، میتوان وسیله نقلیه را در حالت 4WD قرار داد.
حالات قرار گرفتن دنده عبارتند از: 4WD Hi, 2WD و 4WD LO. این سیستم برای استفاده در مکانهای بدون جاده عالی است و هنگامی که همزمان با قفل دیفرانسیل بهکار گرفته شود، بیشترین کارایی را خواهد داشت (جیب ویلیز 1942).
Full Time 4WD
از این سیستم میتوان همیشه و در تمامی مسیرها از جمله آسفالته استفاده کرد.این سیستم 4WD برای ایجاد قدرت کشش بیشتر در وسیله نقلیه و کارامدتر کردن 4WD برای استفاده روزمره ساخته شده است. به این سیستم، 4WD دائم نیز میگویند.
استقرار دیفرانیسل اضافی در مجموعه انتقال قدرت وسیله نقلیه، امکان بهرهبرداری دائمی از 4WD را فراهم میسازد. در این سیستم، حالت 2WD وجود ندارد. با وجود این سیستم، شما اسبی قدرتمند در اختیار خواهید داشت. مزیت استفاده از Full Time 4WD در جادههای نامساعد، استحکام بیشتر در حرکت به عنوان یک نکته ایمنی در رانندگی روزانه است.
انواع حالتهای قرار گرفتن دنده در این سیستم، عبارتند از: 4WD Hi و 4WD LO. این سیستم در خارج از جاده و در صورت قابلیت قفل شدن بسیار خوب عمل میکند، اما همزمان با قفل محور دیفرانسیل، بهترین عملکرد را دارد (رنجرور 1969).
سیستم Full Time symmetric AWD
این سیستم مشابه 4WD دائمی است، با این تفاوت که فاقد گشتاور سرعت کم و یا در واقع الگوی مسافت کوتاه است. از این سیستم، همواره و در تمامی جادهها از جمله آسفالته میتوان استفاده کرد. این سیستم، یکی از مظاهر ایمنی در وسائط نقلیه امروزی است، اما گرچه برای کار سنگین طراحی نشده، باعث ایمنتر و دلپذیرتر شدن وسیله نقلیه میشود. این سیستم در رقابت برای حرکت در جادههای ناهموار، تقریباً بازنده است زیرا تأکید بیشتر بر استحکام و عملکرد آن بوده و بهتر است که در خارج از جاده، کمتر مورد استفاده قرار گیرد (آئودی کواترو 1980 و اکثر خودروهای سوبارو).
سیستم Automatic Asymmetric AWD
سیستم اتوماتیک متقارن AWD، ابتدا فقط به عنوان سیستمی مستحکم و قدرتمند ساخته شده بود. از این سیستم میتوان به طور مداوم در تمامی سطوح از جمله مسیرهای آسفالته استفاده کرد. سیستم AWD بهطور دائمی عمل نمیکند بلکه فقط هنگامی به کار میافتد که شرایط تعادل وسیله نقلیه از بین برود. اساساً خودروهای دارای این سیستم، خودروهایی با دیفرانسیل 2WD و فاقد قابلیتهای حرکت در جادههای نامساعد هستند. واضح است که این سیستم تنها برای افزایش ایمنی، استحکام و تعادل در حرکت ساخته شده و استفاده از آن در مسیرهای خارج از جاده و جادههای ناهموار، توصیه نمیشود (ولوو 1996)
گفتنی است که امروزه بسیاری از وسائط نقلیه، ترکیبی از انواع سیستمهای 4WD را مورد استفاده قرار میدهند.
خودرو یکپارچه رانش(تمام چرخها محرک)AWL
خودرو یکپارچه رانش(تمام چرخها محرک)
در خودروهای تمام چرخها محرک، یکی از محورهای جلو یا عقب محرک اصلی است. برای بهبود ویژگی
های رانشی و پایداری خودرو، بخشی از گشتاور خودرو به محور دیگر منتقل میشود. مانند میتسوبیشی که توضیح کامل ان را در پست های بعدی مشاهده خواهید کرد.
خودروهای چند-جرخ-محرک نوع جدیدی از خودروهای برقی هستند که در آنها هر یک از چرخها به صورت جداگانه توسط یک موتور به حرکت در می آید.
پیشرفتهای اخیر در این نوع سیستمهای محرکه موید تاثیر زیاد آن در خودروهای برقی و مرکب آینده می باشد. چرخهای موتوردار می توانند در خودروهای برقی خالص، مرکب سری و پیل سوختی به کار می روند. این سیستم با حذف موتور مرکزی و سیستم انتقال قدرت انعطاف پذیری زیادی در طراحی فضا برای تجهیزات خودرو برقی فراهم می آورد.
. علاوه بر مزایای متعدد این روش در ساخت خودروبرقی ، با کنترل مستقل گشتاور چرخها، توانایی دیگری نیز برای این نوع خودرو فراهم می شود که کمک به راننده برای تصحیح مسیر و افزایش پایداری به هنگام حرکت در جاده های لغزنده است. در این رساله یک راهبرد جدید کنترلی برای افزایش پایداری خودروهای برقی چهار-چرخ-محرک ارائه می شود.این سیستم برای حفظ تعادل خودرو در شرایط اضطراری به راننده
شامل 14 صفحه فایل word قابل ویرایش
دانلود مقاله خودروهای چهار چرخ محرک


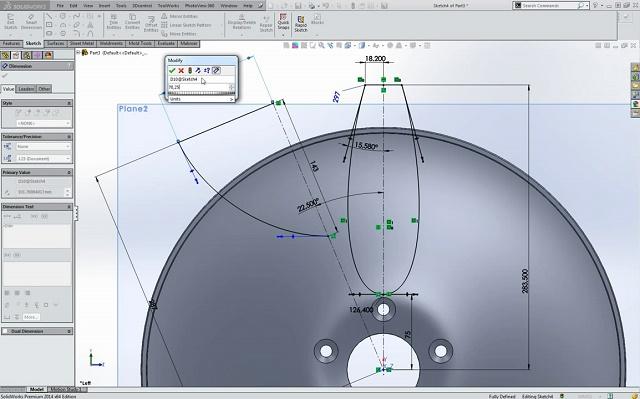
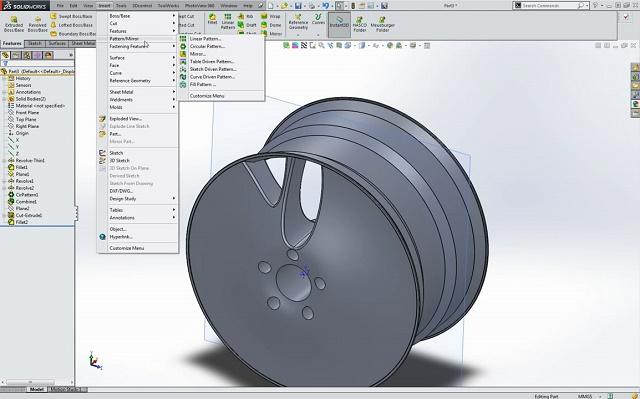
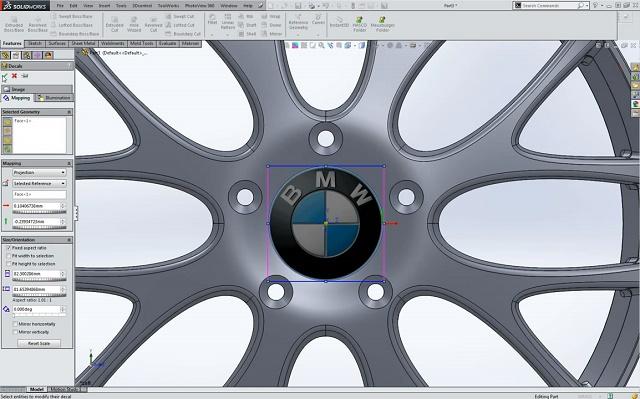
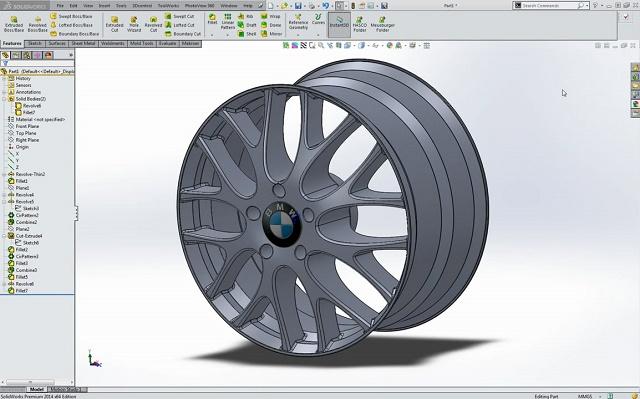
 در نرم افزار SolidWorks")