

در این بخش تحقیق جامعی با موضوع و عنوان نیروگاههای سیکل ترکیبی و انواع آن برای دانلود قرار داده شده است. این تحقیق در 129 صفحه و با فرمت WORD میباشد. در ذیل فهرست مطالب آن آورده شده است.

دانلود تحقیق نیروگاههای سیکل ترکیبی و انواع آن
در این بخش تحقیق جامعی با موضوع و عنوان نیروگاههای سیکل ترکیبی و انواع آن برای دانلود قرار داده شده است. این تحقیق در 129 صفحه و با فرمت WORD میباشد. در ذیل فهرست مطالب آن آورده شده است.
پاورپوینت کار آفرینی در ایران
58اسلاید
واژه «کارآفرینی» واژهای است نو، که از کلمه اش نمیتوان به مفهوم واقعی آن دست یافت.این واژه معادل Entrepreneurship در زبان انگلیسی است و ریشه آن از زبان فرانسوی گرفته شده است. به عبارت دیگر هنوزدر فارسی معادل دقیقی برای انتقال «مفهوم» کارآفرینی وجود ندارد و اغلب واژه کارآفرینی شنونده ناآشنا به آن را به اشتباه می اندازد. اما بین استادان دانشگاهها، دانشجویان رشته های اقتصاد، مدیریت و برخی محافل علمی این واژه تا حدودی مصطلح شده است. به طور کلی «کارآفرینی» از ابتدای خلقت بشر و همراه با او در تمام شئون زندگی حضور داشته و مبنای تحولات وپیشرفتهای بشری بوده است. لیکن تعاریف زیاد و متنوعی از آن شده است. با این همه، مفهوم و ماهیت اصلی کارآفرینی هنوزشناخته شده نیست و نمیتوان تعریف استاندارد و جامع و مانعی از آن به دست داد. پاسخ به پرسشهای زیر در شناخت بهترمفهوم کارآفرینی موثر خواهد بود:
مفهوم و ایده کارآفرینی، مفهومی جدید و متعلق به عصر حاضر نمیباشد. این مفهوم از قبل از قرون وسطی مطرح بودهکه در طول زمان دچار تحولاتی نیز شده است. به طور خلاصه، کارآفرین سازمان دهنده و فعال کننده یک واحد اقتصادی (یاغیر اقتصادی) و کسب و کار به منظور دستیابی به سود (دستاوردهای) شخصی (یا اجتماعی) است. یک کارآفرین به منظور تحقق ایدهایش عوامل مورد نیاز مانند: زمین، نیروی کار، مواد مصرفی و سرمایه را فراهم آورده و بااستفاده از قدرت تصمیم گیری، مهارتها و استعدادهای فردی اش در طراحی، سازماندهی، راهاندازی و مدیریت واحد جدید، ایده اش را تحقق میسازد و از این راه به کسب درآمد میپردازد. همچنین در این راه یک عدم موفقیت را به دلیل فعالیت درمحیط غیر قابل کنترل و مبهم و باموانع پیش بینی نشده میپذیرد. ازنظر علم اقتصاد، کارآفرین فردی است که با صرف زمان و انرژی لازم، منابع، نیروی کار، مواد اولیه و سایردارائیها را به گونه ای هماهنگ میسازد که ارزش آنها و یا محصولات حاصل از آنها نسبت به حالت اولیه اش افزایش یابد (ایجاد ارزش افزوده کند). همچنین کارآفرین سرمایه دارنیست ولی قادر است از سرمایه های راکد به خوبی استفاده کند. همچنین او مخترع، عالم، متخصص و هنرمند نیست ولی توان بهره برداری مناسب از علم، تخصص و هنر دیگران را دارد. بطور کلی؛ کارآفرینی به فرایند شناسایی فرصتهای جدید، ایجاد کسب و کار و سازمانهای جدید، نوآور و رشد یابنده برای بهره برداری از فرصتهای شناسایی شده اطلاق میشود که در نتیجه آن کالاها و خدمات جدیدی به جامعه عرضه میشود.
")

دانلود فایل فلش Samsung Galaxy S4 Mini Duos (GT-I9192)
دانلود فایل فلش Samsung Galaxy S4 Mini Duos GT-I9192
دانلود فایل فلش Samsung Galaxy S4 Mini Duos
دانلود فایل فلش Samsung Galaxy S4 Mini
دانلود فایل فلش Samsung Galaxy S4
دانلود فایل فلش Samsung Galaxy
دانلود فایل فلش Samsung
دانلود فایل فلش Galaxy S4 Mini Duos GT-I9192
دانلود فایل فلش S4 Mini Duos GT-I9192
دانلود فایل فلش GT-I9192
دانلود فایل فلش Samsung Galaxy GT-I9192
دانلود فایل فلش Samsung GT-I9192
اندروید: 4.4.2
ورژن: I9192UBUCOI2_I9192ZTMCOC2_ZTM
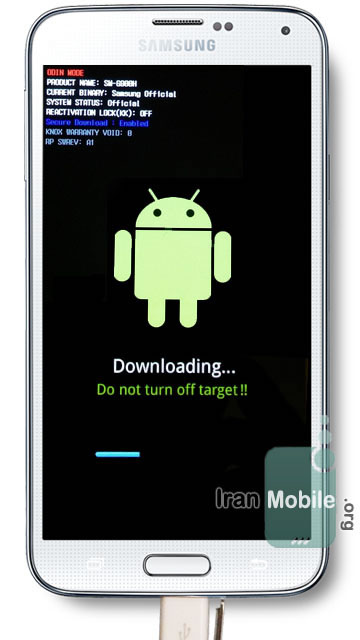
گوشی را به Downloading ببرید. برای این کار ابتدا گوشی را خاموش کنید. سپس کلید کاهش صدا (-Volume) + کلید Home + Power را همزمان بگیرید.

بعد از مشاهده تصویر فوق کلید افزایش صدا (+Volume) را بزنید تا به صفحه Downloading بروید.
نرم افزار Odin.exe را اجرا کنید.
کابل USB را متصل کنید و منتظر باشید خانه اول ID:COM آبی شود.
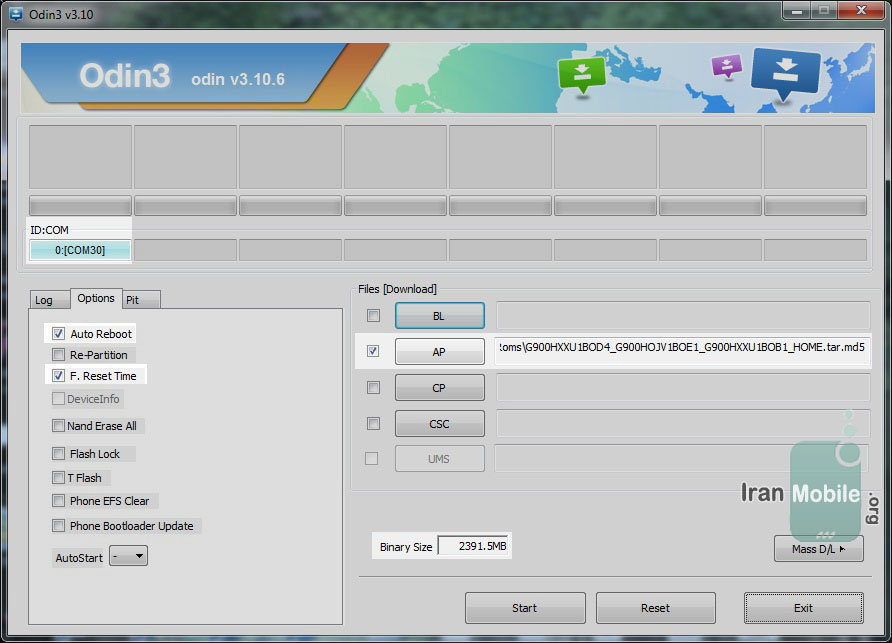
هیچ چیزی را تغییر ندهید : یعنی بخش Option گزینه Auto Reboot و F. Reset Time تیک دار و Re-Partion و سایر گزینه ها تیک نداشته باشد.
حال روی کلید AP کلیک کنید و تک فایل رام خود با پسوند tar .md5. را انتخاب کنید.(باید رام را قبلا از Zip خارج کنید) مدتی صبر کنید فایل بارگذاری شود.
برنامه دارای سه بخش Log (گزارشات) ، Option (تنظیمات) و Pit (فایل PIT) می باشد : اگر رام شما چند فایله است بخش Option فقط گزینه Auto Reboot و F. Reset Time تیک دار باشند.
حال اگر فایل با پسوند PIT. دارید گزینه Re-Partion را نیز تیک بزنید. اگر ندارید احتیاجی نیست.
فایل PIT حافظه داخلی گوشی را مجدد قسمت بندی (پارتیشن بندی) می کند و این فایل فقط زمانی نیاز می شود که رام قبلی و جدید شما دارای اختصاص بندی حافظه متفاوتی باشند. به طور مثال در G900HXXUBOD5 عبارت سبز متفاوتی داشته باشند.(XXS نیز مانند XXU می باشد و U و S حرف سوم متفاوت باشد عیبی ندارد و باز هم یکسان هستند) به طور معمول نیازی به این فایل نیست و آن را تیک نزنید و توصیه نمی شود کاربران عادی از آن استفاده کنند.
بخشFiles [Download]i شامل گزینه های زیر می باشد. باید با دقت زیاد هر کدام را با کلیک روی دکمه آن، انتخاب کنید.
BL : فایل بوت لودر که معمولا با BL شروع می شود.
AP : فایل PDA ، فایلی که در آن عبارت Code یا PDA درج شده فایل AP است. (حجیم ترین فایل)
Cell Phone : CP ، فایلی که در آن عبارت Modem درج شده و یا با CP شروع می شود.
CSC : فایلی که در آن عبارت csc یا multi-csc درج شده است و یا با CSC یا Home_CSC شروع می شود.
تذکر مهم 1 : اگر رام شما 5 فایل بود و دو CSC داشت دقت کنید اگر فایل HOME_CSC را به نرم افزار بدهید اطلاعات گوشی شما حذف نمی شود و اگر فایل CSC را بدهید اطلاعات حافظه داخلی شما حذف می شود.
تذکر مهم 2 : رام های 4 فایل تبلت های فاقد شیار سیم کارت مثل SM-T580 ، فایل CP ندارند ، لذا گزینه CP را خالی بگذارید.
تذکر مهم 3 : به هیچ عنوان در گوشی های آنلاک اپراتوری فایل CP را به نرم افزار ODIN ندهید و آن را خالی بگذارید. (اگر مدل دستگاه در بخش About تنظیمات و حالت دانلودینگ یکسان نبود با استفاده از Odin آپدیت نکنید!)
حال روی دکمه START بزنید. تا تصویر زیر بعد از مدتی مشاهده شود.
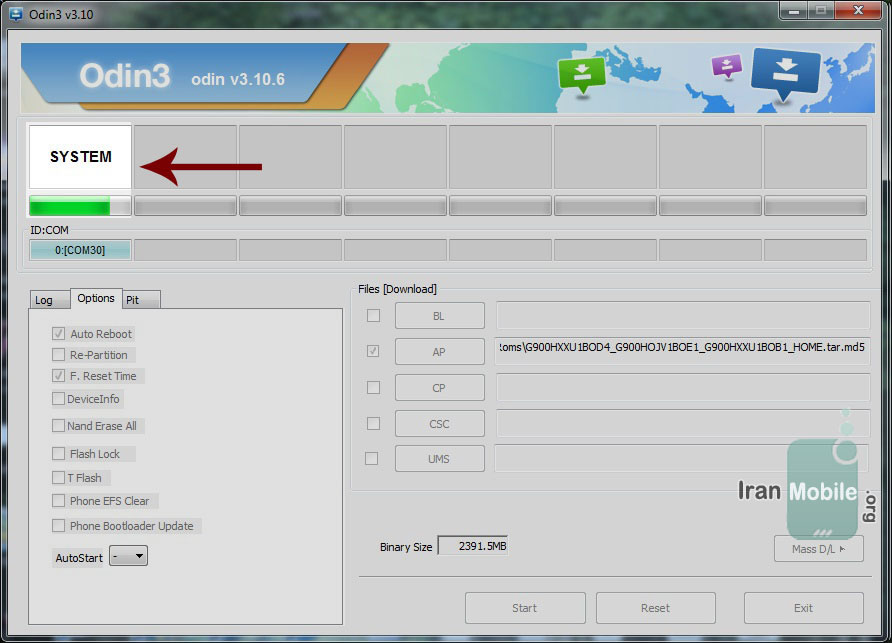
8 صبر کنید تا پردازش 100 درصد شود. و عبارت PASS دیده شود.

بعد از اتمام Optimazing App در گوشی، دستگاه روشن خواهد شد و کابل را جدا کنید.

اکنون کار تقریبا تمام است و گوشی شما آماده استفاده با نسخه جدید می باشد.


سنسورهای مگنتورزیستیو
Magnetoresistive sensors
کـــــاربـــرد ها
این سنسور ها برای پیدا کردن اشیاء مغناطیسی در هواپیماها، قطار واتومبیل ها که میدان مغناطیسی زمین را به هم می زنند به کار می روند.
از کاربردهای دیگر آنها در قطب نمای مغناطیسی، سنسورهای زوایه ای و چرخشی موقعیت، ردیابی و هدایت مته در زیر زمین می تواند یادکرد
برخلاف دیگر سنسورهای AMR سنسور موقعیت AMR باید توسط میدان خارجی به حالت اشباع در آید یعنی با افزایش بزرگی میدان تغییری در مقدار مقاومت AMR پدید نیاید و تنها عاملی از موقعیت میدان بر مبنای زاویه حاصل بین بردارمغناطیس کنندگی و جریان باشد. بنابراین این سنسورهای موقعیت سنجی درناحیه اشباع عمل می کنند.
رخلاف سنسورهای اثرهال که نیاز به میدان مغناطیسی درحد کیلوگارس نیاز دارند، AMR به این شدت میدان مغناطیسی نیازی ندارد. با استفاده از چند سنسور خاصیت براحتی افزایش می یابد.
برای توضیح کاربرد ها ، از دو سنسور صنعتی شرکت Honeywell با نامهای HMC1501 و HMC1512 می کنیم .
سنسورهای HMC1501 و HMC1512 به ترتیب دارای مقاومت 5 و 2.1 کیلواهم در مدار پل می باشند. ضریب حساسیت آنها بین می باشد. ( در ناحیه خطی عملکرد) ولتاژ خروجی تقریباً ±120mv می باشد. پهنای باند درحدود 5MHZ می باشد.
HMC1501 دسته ازموقعیت سنجهای AMR هستند که دارای یک پل وتستون برای موقعیت سنجی می باشند خروجی مدار پل به شرح زیر است:
HMC1512 دسته ای دیگر از موقعیت سنجهای AMR است که دارای دو پل وتستون برای رنج می باشد. که خروجی هر یک از مدارهای پل بصورت و می باشد.
رزولوشن و رنج کاری هریک در Data sheet آمده است.
کاربردهای خطی
دیاگرام زیر 2 دوره متناوب از خروجی مدار پل را نشان می دهد، ناحیه خطی در بازه ای در اطراف زوایای 180-،90-،0،90،180 درجه قرار دارد. در نقاط 0 و شیب مثبت و در بقیه شیب منفی است.
خروجی سنسورهای موقعیت AMR نیازمند مدار بهسازی است. چنانچه تغییرات دمایی زیاد باشد باید از جبرانساز دمایی نیز استفاده نماییم. همینطور اگر از چند مدار پل استفاده نماییم، خطای دیگری که باید آنرا بطریقی جبران نماییم تلورانس بخش به بخش در مواد است.
شکل زیر یکی از کاربردهای موقعیت سنجی خطی را نشان میدهد.
IC بکار گرفته شده HMC1501 است که دارای یک مدار پل می باشد و می تواند را در رنج تغییرات خطی تعیین کند. با فرض منبع تغذیه 5 ولت این سنسور دربازه میلی ولت تغییرات ولتاژ خواهد داشت. شکل موج خروجی بر حسب زوایه q در زیرآمده است.
شکل زیر یک تقویت کننده ابزار دقیق را نشان می دهد. یک تقویت کننده تفاضلی وانتگرالی. گین ولتاژ این تقویت کننده تقریباً 25 ولت است. بنابراین مقدار پیک - پیک خروجی را از 120 میلی ولت به 3 ولت تغییر می ده
ضریب ولتاژ آفست مدار پل و با منبع تغذیه 5 ولت آفست مدار پل 35mV خواهد بود که در نهایت با وجود تقویت کننده به ±850mv خواهدرسید. بنابراین باید بگونه ای آفست مدار را تضعیف نمود. یک روش برای مقابله با آفست مدار تغییر زمین مدار با استفاده از یک پتانسیومتر می باشد
روش دیگری برای حذف خطای آفست وجود دارد و آن این است تا بوسیله آزمایش کالیبراسیون مقدار خطا را بدست آورده و از مقدار نهایی کم کنیم. این عمل با کاهش متعلقات مدار بهسازی از افزایش حجم، قیمت و تاثیر نویز جلوگیری می کند. ولی از آن جهت که طراح را مجبور می کند تا بهره تقویت کننده را جهت تعادل در آفست و ضریب حساسیت کاهش دهد چندان جالب نمی باشد.
جهت افزایش رنج موقعیت سنجی از به از 2 سنسور HMC1501 و یا یک سنسور HMC1512 (با 2 مدار پل) استفاده می کنیم.
برای افزایش رنج اندازه گیری موقعیت خطی معمولاً از چند سنسور استفاده می کنیم. جهت افزایش ویژگی خطی سیستم معمولاً رنج خطی هر سنسور را کمتر از حد نامی در نظر می گیرند. به خاطر داریم که برای موقعیت سنج خطی می بایست AMR در ناحیه اشباع قرار گیرد. بنابراین فاصله آهنربای متحرک از مقابل سنسورها بازای میدان یک کیلو گاوسی حداکثر 25/0 اینج خواهد بود که با افزایش فاصله به 5/0 اینج میدان می بایست به حدود 3 کیلوگاوس افزایش یابد. همانطور که در شکل زیر
مشخص است با عبور آهنربا از مقابل سنسورها بازای 4 سنسور 4 موج بوجود خواهد آمد. بازای یک موقعیت سنج 2 اینچی نمودار تغییرات ولتاژ خروجی برحسب موقعیت برای یک سنسور و 4 سنسور رسم شده است.
رزولوشن برای این سنسور در حدود 002/0 اینچ است و دقت در حدود %0.1 می باشد.
در حاصل از هر مدار پل سنسور، باید بدانیم که هر سنسور جهت حذف خطای آفست واندازه گیری ولتاژ پیک-پیک خروجی کالیبره شده است تا خروجی نهایی در یک رنج مشابه تنظیم گردد. پس از کالیبراسیون ولتاژ خود را تشکیل می دهد و عمل مقایسه ما بین ولتاژهای خروجی تصحیح شده انجام می شود و شیب هایی را در میان سنسورهای مجاور هم تولید می کند. درنهایت تنها از شیب های مثبت استفاده می شود (رنج خطی هر سنسور) و مقدار کوچک برشیب یا شیب های مثبت قرار داده می شود. با فرض اینکه هر سنسور به یک میکروکنترلر 8 بیتی متصل باشد، می تواند 256 نقطه را برای رنج خطی خود در نظر بگیرد. بنابراین برای کل رنج 1024 نقطه خواهیم داشت.
برای افزایش رنج موقعیت سنجی خطی روش دیگری مطرح است. شکل زیر کاربرد خطی را نمایش می دهد.
دو آهنربا را نشان می دهد که نسبت به هم در وضعیت ناموازی قرار گرفته اند و در فاصله میان آنها سنسور در طول دوآهنربا حرکت می کند. در موقعیت های نزدیک زوایه شار روبه پایین است و در فاصله های دور زاویه شار رو به بالا قرار دارد. بنابراین با یک سنسور AMR می توان موقعیت سنجی نمود. در این حالت هم آهنربا، هم سنسور می توانند نسبت به هم حرکت کنند.
کاربرد های زاویه ای
شکل زیر یک آهنربای متصل به انتهای شفت را نشان می دهد که در برابر یک سنسور HMC1512 قرار گرفته است. زمانی که شفت می چرخد دو ولتاژ سینوسی وکیسنوسی در خروجیهای سنسور قرار می گیرد
پس از حذف ولتاژ آفست با تقسیم خروجیها برهم توسط میکروکنترلر خواهیم داشت:
باتوجه به ویژگی q که تابعی از معکوس تانژانت است حالت زیر رخ می دهد:
شکل زیر مدار ارتباطی با میکروکنترلر را نشان می دهد. توجه داریم که چنانچه زوایه چرخش بیشتر از ±90° باشد با ز هم خروجی برمبنای ورودی محدود خود تعیین می شود یعنی خروجی هیچگاه از بازه ±90° خارج نمی شود.
چنانچه انتهای شفت قابل استفاده یا در دسترس نباشد از یک آهنربای حلقه ای با قطب هایی که بصورت قطاع قرار گرفته اند. شکل زیر از یک آهنربا و دو سنسور HMC1501 تشکیل شده است.
این روش نمی تواند تمام محیط شفت را در برگیرد ( ) و در عین حال باید محافظتی از میدان مغناطیسی موتور نیز در نظرگرفته شود. نکته دیگری که باید در نظر گرفت این است که تداخلی در موقعیت دو سنسور وجود دارد تا اینکه یک یا هر دو به اشباع برسند.
برای ایجاد حسگر چرخشی 360 درجه از یک سنسور HMC1512 به همراه سنسور هال استفاده می کنیم. سنسورهای هال برای موقعیت سنجی دقیق و حساس پیشنهاد نمی گردند. در این روش از آنها جهت تعیین پلا ریته که کدام نیمه از سنسور AMR در مقابل آهنربا می باشد، استفاده می شود.
وقتی که آهنربای متصل به شفت بدور سنسورهای هال و AMR می چرخند، پلاریته ولتاژ سنسور اثرهال تغییر می کند. با به بکاربردن یک مدار مقایسه گر درخروجی سنسوراثرهال، موقعیت، تبدیل به 2 حالت 180 درجه می شود که با موقعیت سنجی از سنسور AMR یک موقعیت سنجی خواهیم داشت.
برای حالت زوایه ای شکل زیر 2 آهنربای حلقه ای که به یک شفت قرار گرفته اند را نشان می دهد.
آهنربا ها بصورت غیر هم مرکز با شفت قرار گرفته اند. هر آهنربا با دیگری 180° فاصله از مرکز دارد. 2 موقعیت سنج به گونه ای قرار گرفته اند.تا 360 درجه چرخش را پوشش دهد.
میدان مغناطیسی زمین در یک سطح وسیع (چند کیلومتر مربع) یکنواخت است. مطابق شکل زیر
یک شی مغناطیسی آشفتگی موضعی در میدان زمین ایجاد می کند. سنسورهای AMR تغییرات و آشفتگی میدان زمین را احساس می کند
یک سنسور یک محوره AMR می تواند حضور یا عدم حضور اتومبیل را تا فاصله 15متری، وابسته به جنس، درک کند. از این ویژگی در پارکینگ ها جهت در اختیار قراردادن راننده از فضاهای کافی استفاده می شود. کاربرد دیگری در کنترل ترافیک، وجود دارد که معمولاً 3 سنسور AMR را در یک مسیر باریک قرار می دهند. ا ین سنسورها زمانی که وسیله نقلیه ای از بالای آنها عبور کند سیگنال هایی را ایجاد می کند.
قطب نمای الکتریکی با استفاده از AMR
میدان مغناطیسی زمین در حدود 0.5 تا 0.6 گوس می باشد و تقریباً موازی سطح زمین است و همیشه درجهت قطب جنوب می باشد. اینها اساس قطب نماها می باشند. AMR گزینه مناسبی برای قطب نماست، چون رنج حساسیت آن در بزرگی میدان زمین متمرکز است.
word: نوع فایل
سایز:140 KB
تعداد صفحه:22
")

فرمت فایل: doc
حجم فایل: 7 کیلوبایت
تعداد صفحات فایل: 2
پرسشنامه سنجش تفکرات کنونی،دانلودپرسشنامه سنجش تفکرات کنونی،دانلود پرسشنامه
قیمت فایل فقط 5000 تومان
دانلود پرسشنامه
قسمتی از محتوای متن پرسشنامه
1. من نسبت به توانمندی هایم اطمینان دارم.
2. من درباره اینکه آیا بعنوان یک فرد موفق یا شکست خورده نگریسته شوم، نگران نیستم.
3. نسبت به تناسب اندامم احساس رضایت می کنم.
4. من درباره عملکردم احساس ناکامی نمی کنم.
6. من احساس می کنم که دیگران من را دوست دارند و تحسین می کنند.
7. من از وزنم راضی هستم.
مقیاس پرسشنامه
کاملاً موافقم
موافقم
نه موافقم
نه مخالفم
مخالفم
کاملاً مخالفم
نوع پرسشنامه : روان شناسی سازمانی _ روانشناسی
(توضیحات کامل در داخل فایل)
متن کامل را می توانید دانلود نمائید چون فقط تکه هایی از متن در این صفحه درج شده به صورت نمونه
ولی در فایل دانلودی متن کامل
همراه با تمام متن با فرمت ورد word که قابل ویرایش و کپی کردن می باشند
موجود است