دانلود با لینک مستقیم و پر سرعت .

دانلود سورس کد حرکت ماشین و بازوی رباتیک
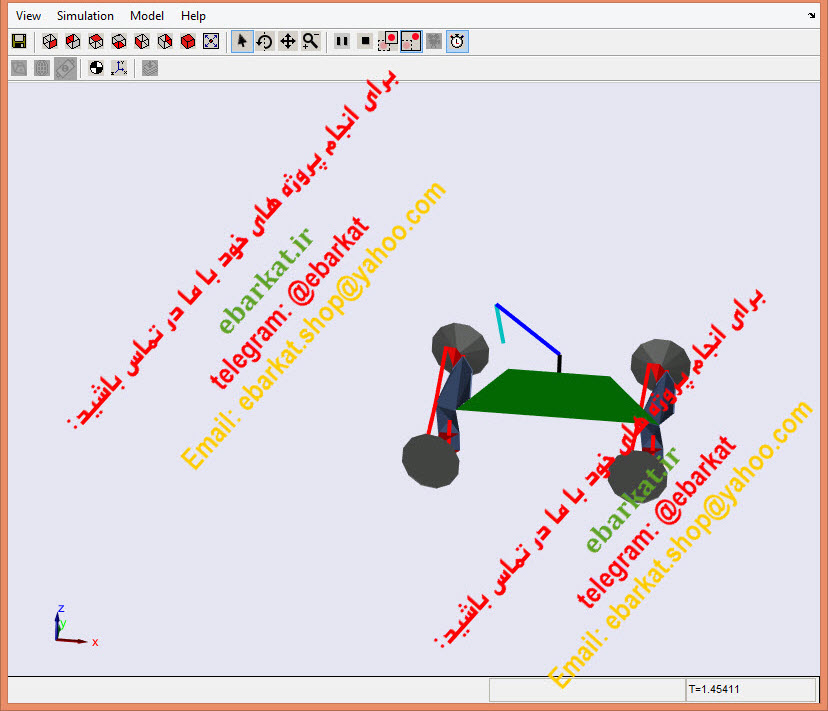
موضوع پروژه: شبیه سازی سیمولینک متلب حرکت یک ماشین چهار چرخ با یک بازوی رباتیک در بالای آن
زبان برنامه نویسی: Matlab Simulink
کتابخانه سیمولینک مورد استفاده: SimMechanics
محیط برنامه نویسی: Matlab MathWorks (نرم افزار متلب)
توضیحات: (برگرفته از ویکی پدیا)
مهندسی رباتیک (به انگلیسی: Robotics engineering) یک برنامه آموزشی با دید تخصصی به رباتیک شامل آموزش زمینههایی از مهندسی برق، کامپیوتر و مکانیک است که در ساخت و استفاده از رباتها مورد نیاز هستند.
هدف از رشته رباتیک تجمیع تحقیقات رباتیک است که در حال حاضر در دپارتمانهای مختلف انجام میشود. دانشجویان این رشته باید بتوانند نقش موثری در توسعه تکنولوژیهای مربوط به رباتیک داشته باشند. این رشته بر پایه دروس علمی و تحقیقات عملی پایه ریزی میشود که در آزمایشگاه رباتیک و تحت نظارت اساتید انجام خواهند شد.
پیش بینی میشود که رباتیک یکی از ۱۰ صنعت برتر آینده باشد. کاربرد محصولات رباتیک از محدوده کارخانجات فراتر رفته و در حال تسری به کاربردهای روزمره است. توسعه و تحقیق در مورد کاربردهای جدید نیازمند توجه ویژه به این رشته و تربیت مهندسین خلاق و متخصص است. از طرفی در چند سال گذشته فعالیتهای چشمگیری در زمینه رباتیک در بین دانش آموزان و دانشجویان صورت پذیرفته که باعث بوجود آمدن طیف وسیعی از علاقهمندان به این رشته گردیده که مشتاق ادامه فعالیتهای آکادمیک در این زمینه هستند. با ایجاد رشته رباتیک میتوان به نیازهای صنعتی و اجتماعی همزمان پاسخ داد.
تجربه فعالیتهای رباتیکی کشور نشان داده است که دانش آموختگان رشته رباتیک به علت ماهیت بین رشتهای و فعالیت تیمی مورد نیاز این رشته، توانایی مهندسی بسیار زیادی کسب کرده و قادرند در تمام صنایعی که نیازمند اتونوموس و طراحی ماشین آلات صنعتی هستند به خوبی ایفای نقش نموده و در پروژههای صنعتی بزرگ شرکت و یا آن را با موفقیت رهبری نمایند.
بازوهای مکانیکی (Manipulator) از رابطهای صلبی تشکیل میشوند که به وسیلهٔ مفصلهایی که حرکت نسبی رابطهای مجاور را ممکن میسازند، به یکدیگر اتصال یافتهاند. بازوهای مکانیکی توانایی انجام عملیات از پیش برنامهریزی شدهٔ متنوعی را در صتایع مختلف دارند. بازوهای مکانیکی ماهر در طی سالهای اخیر به شکل قابل ملاحظهای تکمیل یافته و پیشرفت کردهاند. کارکردن با آنها و نیز تعمیر و نگهداریشان آسانتر شده و ارتباط متناسب و بهینهای میان توان، کنترلپذیری و مهارت آنها ایجاد گشتهاست.
نمونه تصویر خروجی:
آنچه تحویل داده می شود:
1. فایل سیمولینک متلب با فرمت mdl به زبان سی شارپ - خروجی طبق تصویر نمونه آورده شده که ماشین در تصویر حرکت می کند (این برنامه در سیمولینک متلب تست شده و 100 درصد به صورت تضمینی قابل اجرا می باشند) - برای اجرا کافی است این فایل را با متلب اجرا کنید و بر روی دکمه شبیه سازی در سیمولینک کلیک کنید تا خروجی نمایش درآید
2. Mفایل متلب مورد نیاز برای حرکت ماشین
مناسب برای دانشجویان کارشناسی (لیسانس) و کاردانی و کارشناسی ارشد
می توان به عنوان پروژه دروس کارشناسی یا کاردانی یا دیپلم، دروسی مانند هوش مصنوعی، طراحی الگوریتم ها، Artificial Intelligence، آزمایشگاه هوش مصنوعی، رباتیک، دینامیک ماشین، شبیه سازی ماشین، هوش رباتیک، دینامیک حرکت، تجزیه و تحلیل ربات
پس از خرید از درگاه امن بانکی، لینک دانلود در اختیار شما قرار میگیرد و همچنین به آدرس ایمیل شما فرستاده می شود. تماس با ما برای راهنمایی، درخواست مقالات و پایان نامه ها و یا ترجمه و یا انجام پروژه های برنامه نویسی و حل تمرینات با آدرس ایمیل:
ebarkat.shop@yahoo.com
یا شناسه تلگرام (آی دی تلگرام ما): @ebarkat
توجه: اگر کارت بانکی شما رمز دوم ندارد و یا در خرید الکترونیکی به مشکل برخورد کردید و یا به هر دلیلی تمایل به پرداخت الکترونیکی ندارید با ما تماس بگیرید تا راههای دیگری برای پرداخت به شما پیشنهاد کنیم.
توجه توجه توجه: هرگونه کپی برداری و فروش فایل های فروشگاه برکت الکترونیک (به آدرس ebarkat.ir یا codes.sellfile.ir) در فروشگاه های دیگر شرعاً حرام است، تمامی فایل ها و پروژه های موجود در فروشگاه، توسط ما اجرا و پیاده سازی و یا از منابع معتبر زبان اصلی جمع آوری شده اند و دارای حق کپی رایت اسلامی می باشند.
از پایین همین صفحه (بخش پرداخت و دانلود) می توانید این پروژه را خریداری و دانلود نمایید.
کد محصول 30105






